佳淇智能,为国家电力建设做出全方位的服务
Jiaqi Intelligence provides comprehensive services for national power construction

13429666188
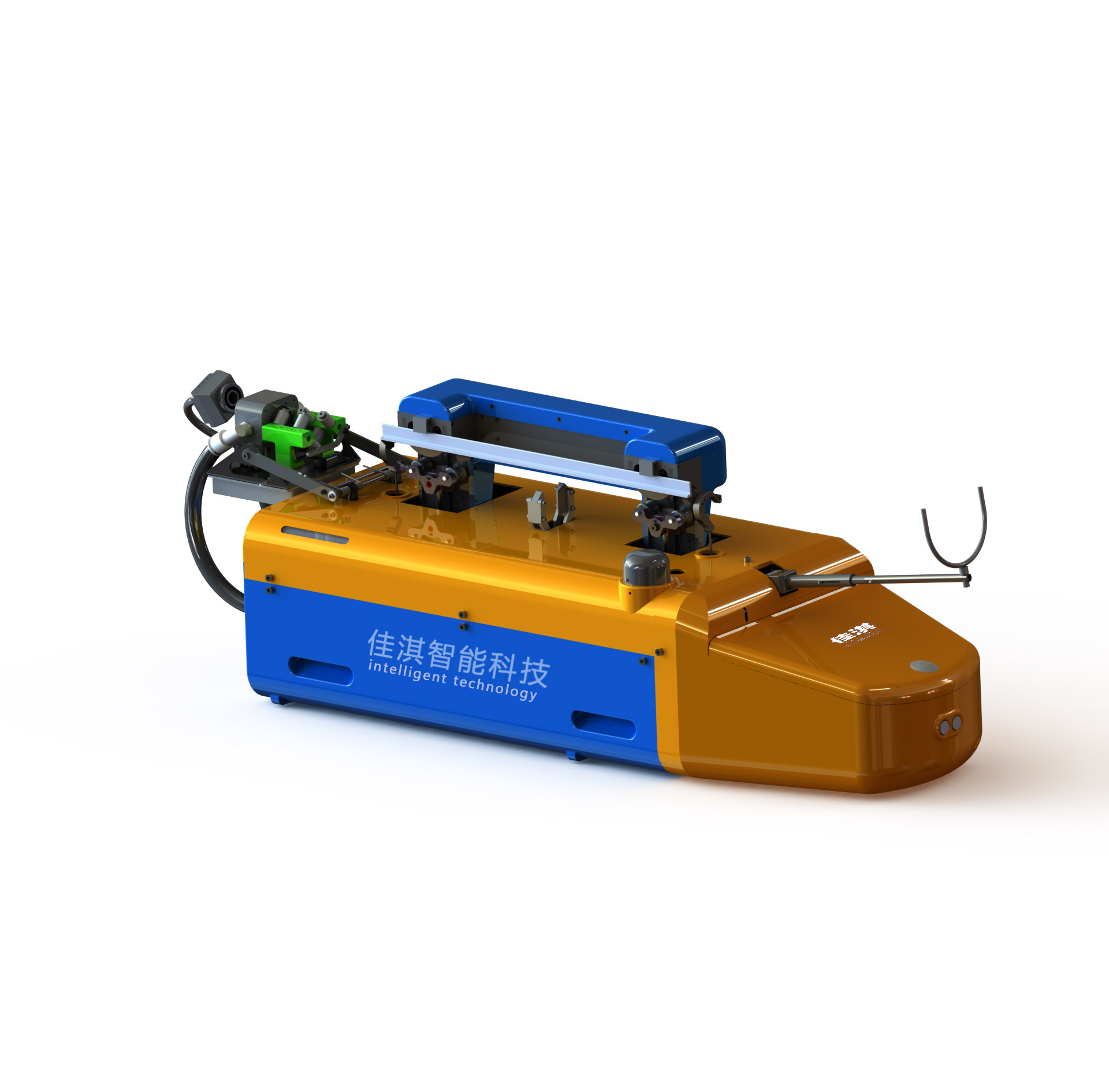
带电涂覆作业机器人是在架空电线路上行走并对导线进行绝缘涂覆的 特种作业设备,主要应用于 10KV/35KV 电力配电网和风电场集电线路的架 空裸导线绝缘化改造。机器人应用多项专利技术和多种新材料、新工艺研制, 可在不停电状态下实现自主上下线,无需人工登高作业。操作人员在地面用 遥控器进行无线遥控,可将行走线路前后方和自身运行状态的视频图像及 数据传回地面,用于监测工作状态,检验涂覆效果,实现便捷高效的架空裸 导线绝缘化改造。
(1)系统组成及工作原理 系统主要由线上主机、地面遥控器及附件组成。线上主机包含卷扬机构、 行走机构、推料机构、涂覆装置等单元;地面遥控器采用平板电脑做人机界 面,与开关按键组合操控。通过触摸屏输入作业工艺要求如线径、涂覆厚度、 行走速度等参数,并实时显示机器人姿态、速度、作业产量及剩余胶量等状 态数据以及机器前、中、后、出胶口四路高清视频。开关按键主要用于实时 控制机器人工作流程。附件包括备用电池、模头组件套装、耗材包等。 机器人采用 PLC 为主控器,协调控制卷扬机构、行走机构、推料机构等 多台伺服电机和直流电机协调工作,精确控制出胶流量,从而精准控制涂覆 层厚度。倾角传感器感知机器的俯仰角、横滚角姿态信息自动调整压紧轮的 压力,提供与路线坡度和滑差状态相适应的驱动力,确保在不同坡度线路上 稳定运行。
(2)关键技术 1、双信道多频段抗干扰无线通讯系统 控制指令数据量小,对传输带宽要求低,对实时性要求高;视频图像传 输数据量大,传输带宽要求高,对实时性要求不高。该系统根据以上特点采 用双信道多频段传输技术,将控制指令与视频图像分别采用独立信道传输, 每个信道采用不同频段。视频及状态数据使用高频段 MIMO 架构传输,操控 指令用低频段传输,有效解决了无线传输的实时性与传输带宽的矛盾,降低 电磁干扰及地物障碍对通讯的影响,保证了遥控操作的稳定性与可靠性。 在硬件上采用增强型全向天线,信号强度自适应调节。
2、便携式云端遥控器 为顺应现场应用的多样性和复杂性,将云端服务器、中央控制器与触 摸显示器无缝结合,组成一体化便携式手持遥控器,超越了传统 HMI 的架 构一台手持遥控器可同时连接3台机器人,操作的移动性、便捷性显著提 升。实物图如下:
3、同轴定位涂覆装置 现有的输配电线路涂覆装置一般使用槽轮对导线进行导向。槽轮的尺 寸固定,适用线径范围小;导线与水平方向的夹角不固定,槽轮受力不均匀。 本装置有效解决了现有输配电线路槽轮定位涂覆装置涂覆层偏心、适应线 径范围小和定位压紧部件受力不均匀等问题。采用双列 V 形排辊导向,同 步对中合模,使涂覆盒与导线轴线的俯仰、水平角度随动,保证涂覆效果。
4、一体化多轴数控系统 升降、行走、注胶多台电机均采用一体化数字式伺服系统驱动,采用基 于电流互感方式的力矩补偿算法,体积小、重量轻、精度高,易于集成控制。
5、平衡升降系统 机器人采用双绳升降动态平衡算法,实现机器人上下线过程中俯仰平 衡,为机器人平稳上下线及摆臂挂线提供稳定姿态。
6、坡度自适应行走轮压紧装置 压紧轮的压紧力采用电驱动传动机构组成,通过倾角传感器与压力传 感器采样数据实时调整压紧力,实现压紧力与机器人行走坡度自适应闭环 控制,提升机器人上下坡能力,节约能耗。
7、线径测量装置(选配组件) 绝缘涂覆机器人要设定的工艺参数按照数学模型精确计算出胶速度, 必须以准确的线径值为基础,若设定的线径值与实际值相差大,就无法满足 对涂覆厚度精确控制的要求。本线径测量装置为系列机器人的选配功能,能 在设备上线时测量线径,若测量值与系统设定值误差较大即提示操作人员 做更改设定值、更换出胶口等后续处理,以保证涂覆质量。
公司地址:浙江省杭州市富阳区银湖街道高尔夫路88号
服务热线:13429666188
公司邮箱:121083384@qq.com
 扫一扫加微信
扫一扫加微信
 扫一扫关注
扫一扫关注
Copyright © 2024 浙江佳淇智能科技有限公司 版权所有 浙ICP备2023001439号-2




